Autonomous Robot
روبوت ذاتي القيادة بتحكم طولي متقدم
روبوت مبني من الصفر، مزوّد بنظام تحكم طولي ذكي يعتمد على المنطق الضبابي ووحدة FLC-PID للتنقل المستقل.
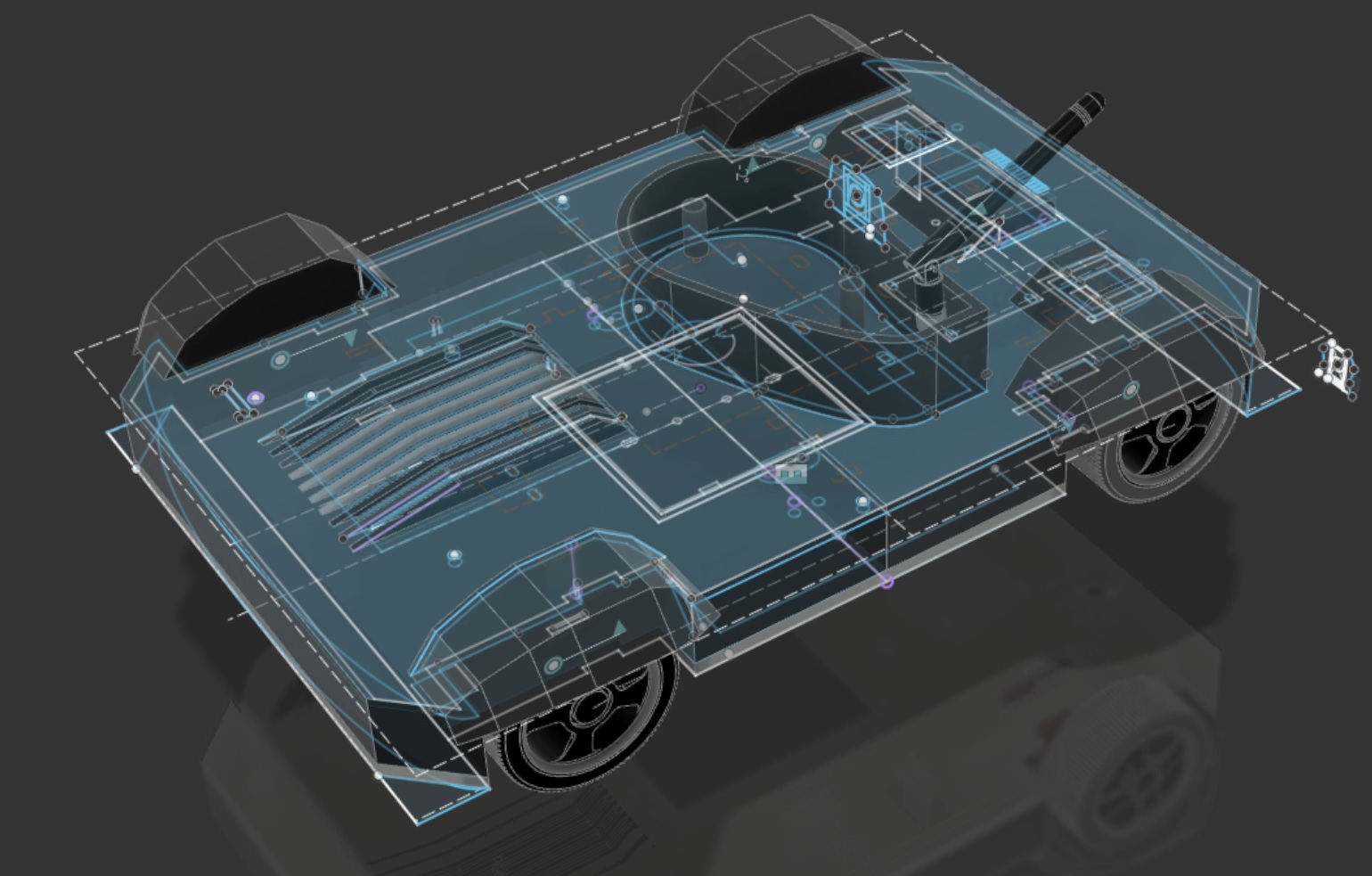
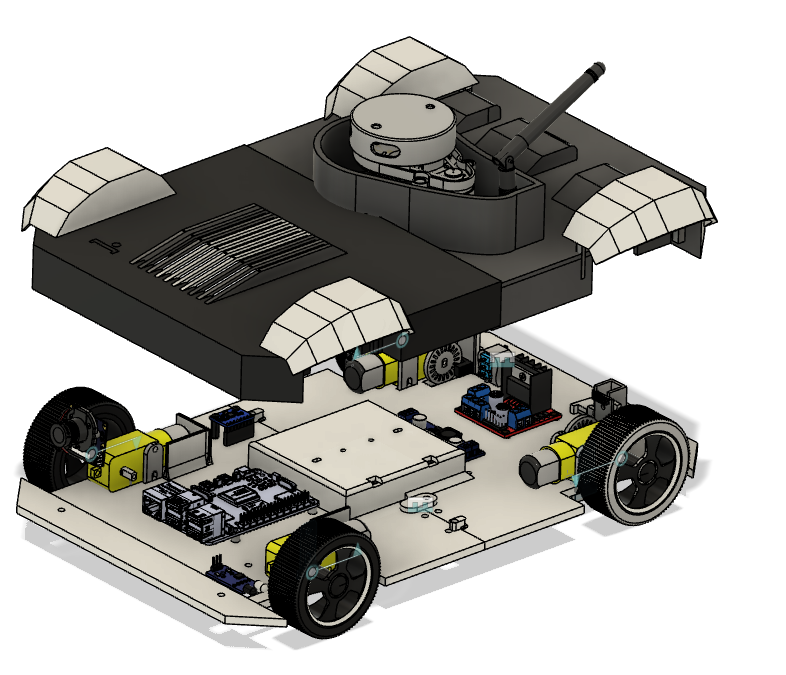
تصميم الهيكل
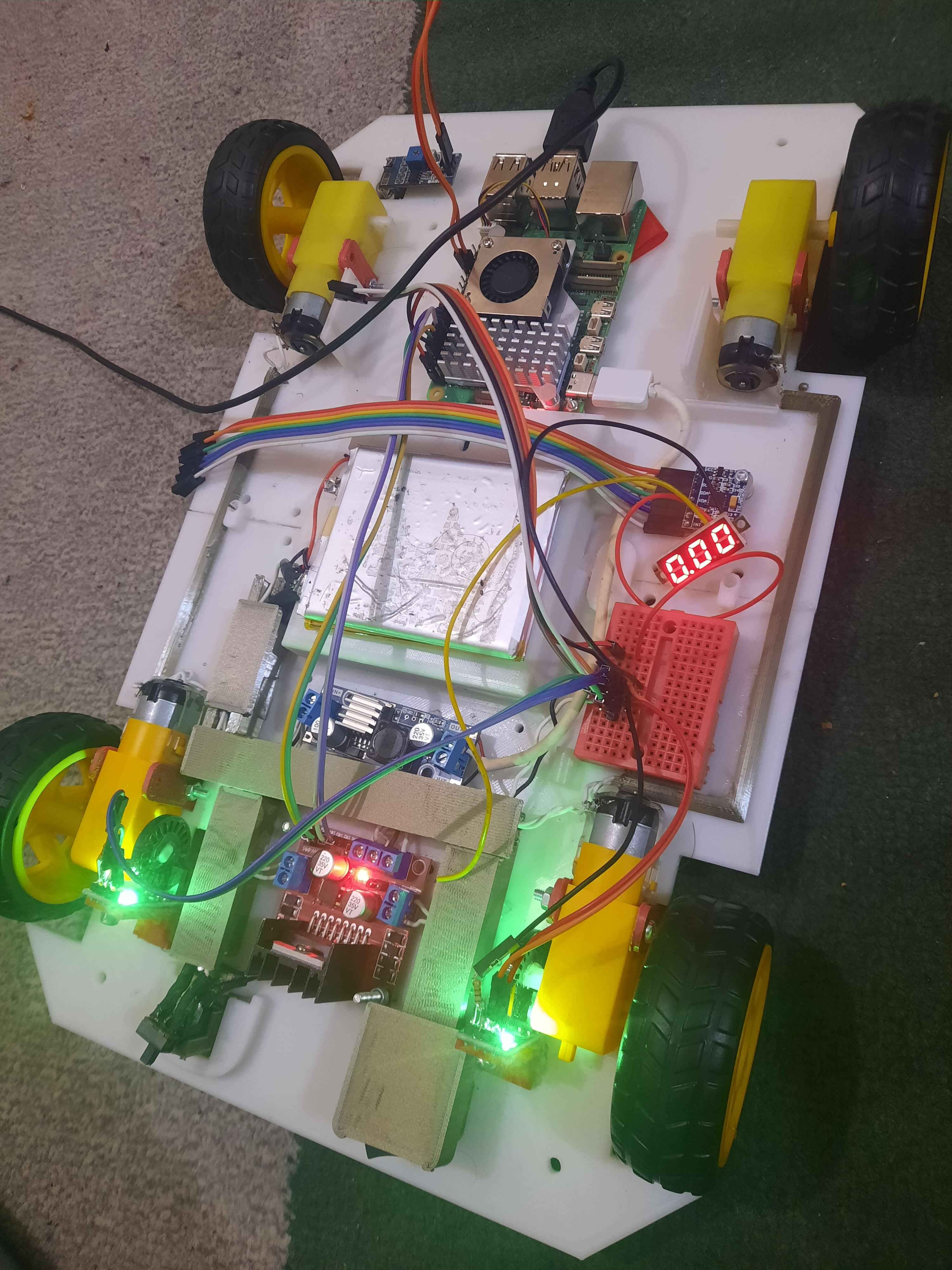
مكونات الروبوت
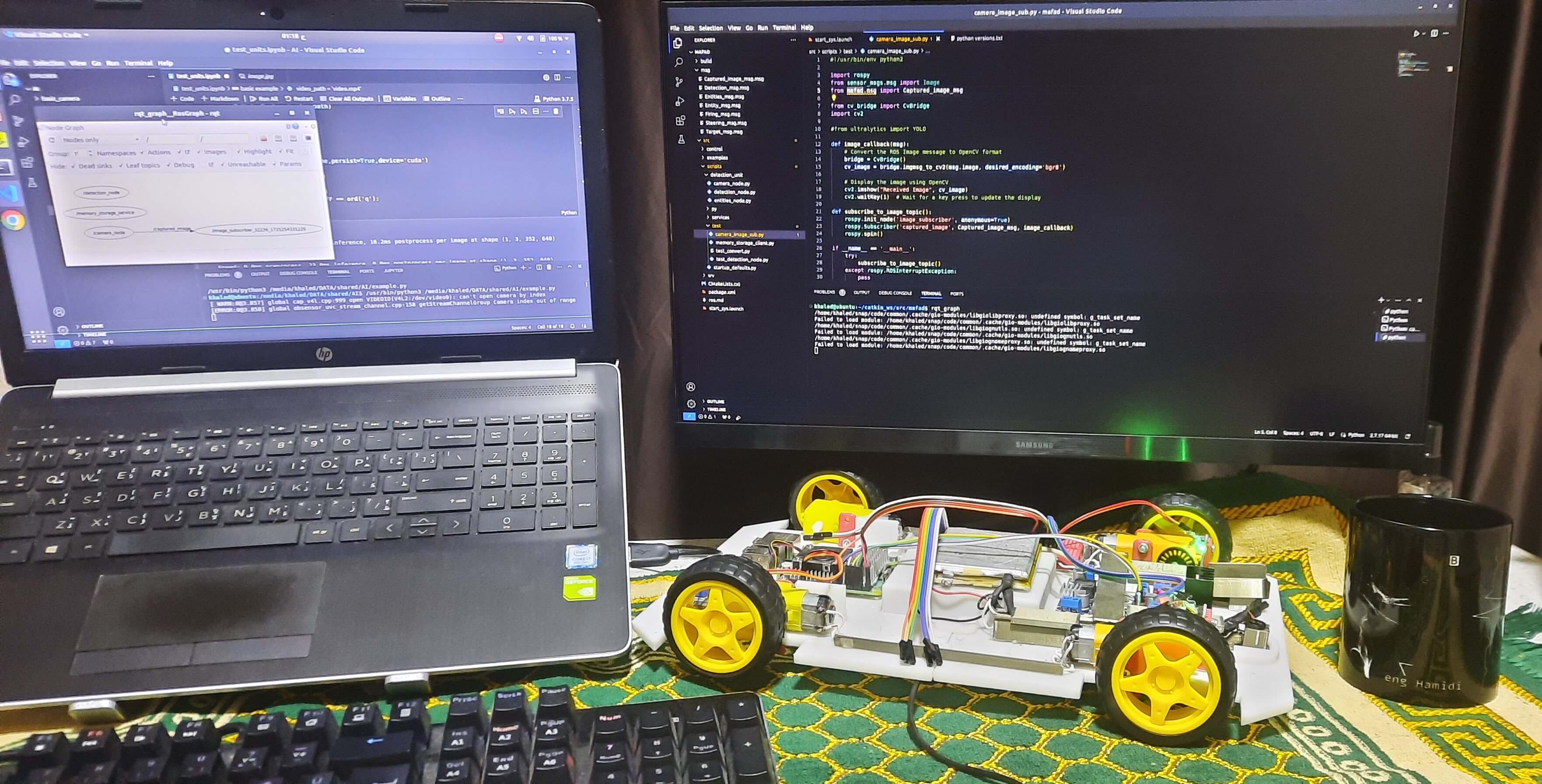
من المحركات إلى الخوارزمية — كل شيء مبني يدويًا
الروبوت مبني بالكامل يدويًا، من اختيار المحركات والحساسات وصولًا إلى تصميم لوحة التحكم وكتابة الكود. ميزته الأساسية هي نظام التحكم الطولي الذكي الذي يُمكّنه من التسارع والكبح والمحافظة على السرعة باستقلالية تامة.
- Raspberry Pi كدماغ للروبوت
- حساسات قياس السرعة والتسارع في الزمن الحقيقي
- نظام دفع رباعي العجلات مضبوط ميكانيكيًا
- خوارزمية FLC-PID مُنفَّذة مباشرة على العتاد
البنية الداخلية

نظام التحكم الطولي — القلب النابض للروبوت
ما يميّز هذا الروبوت ليس فقط بناءه، بل الذكاء الذي يعمل بداخله. نظام التحكم الطولي المبني على FLC-PID يجعله يفكر قبل أن يتحرك — يحسب السرعة المطلوبة، يُعدّل عزم المحركات، ويحافظ على الاستقرار حتى في الظروف غير المثالية.
رحلة البناء
من فكرة على الورق إلى روبوت يتحرك
بدأت بتصميم الهيكل، مررت بلحظات كثيرة من التعديل وإعادة المحاولة، وانتهت بروبوت يتحرك بشكل مستقل.
المحاكاة في MATLAB/Simulink كانت نقطة البداية للتحقق من الخوارزمية، ثم جاء التطبيق الفعلي على Raspberry Pi ليُثبت أن ما يعمل في المحاكاة يعمل كذلك في الواقع.
النتيجة النهائية