
KenoBOT
منصة روبوتية متنقلة للتعليم والبحث
نموذج أولي لاختبار خوارزميات الروبوتات المتنقلة

نظرة عامة على المشروع
KenoBOT هو نموذج أولي لمنصة روبوتية متنقلة طُوّر لأغراض التعليم والبحث. يوفّر المشروع بيئة عملية داخل المختبر لاختبار خوارزميات الملاحة، والتحكم، ورسم الخرائط، ودراسة تكامل المكونات الميكانيكية والإلكترونية والبرمجية ضمن نظام روبوتي واحد.
بنية النظام
المنصة الميكانيكية والحسية
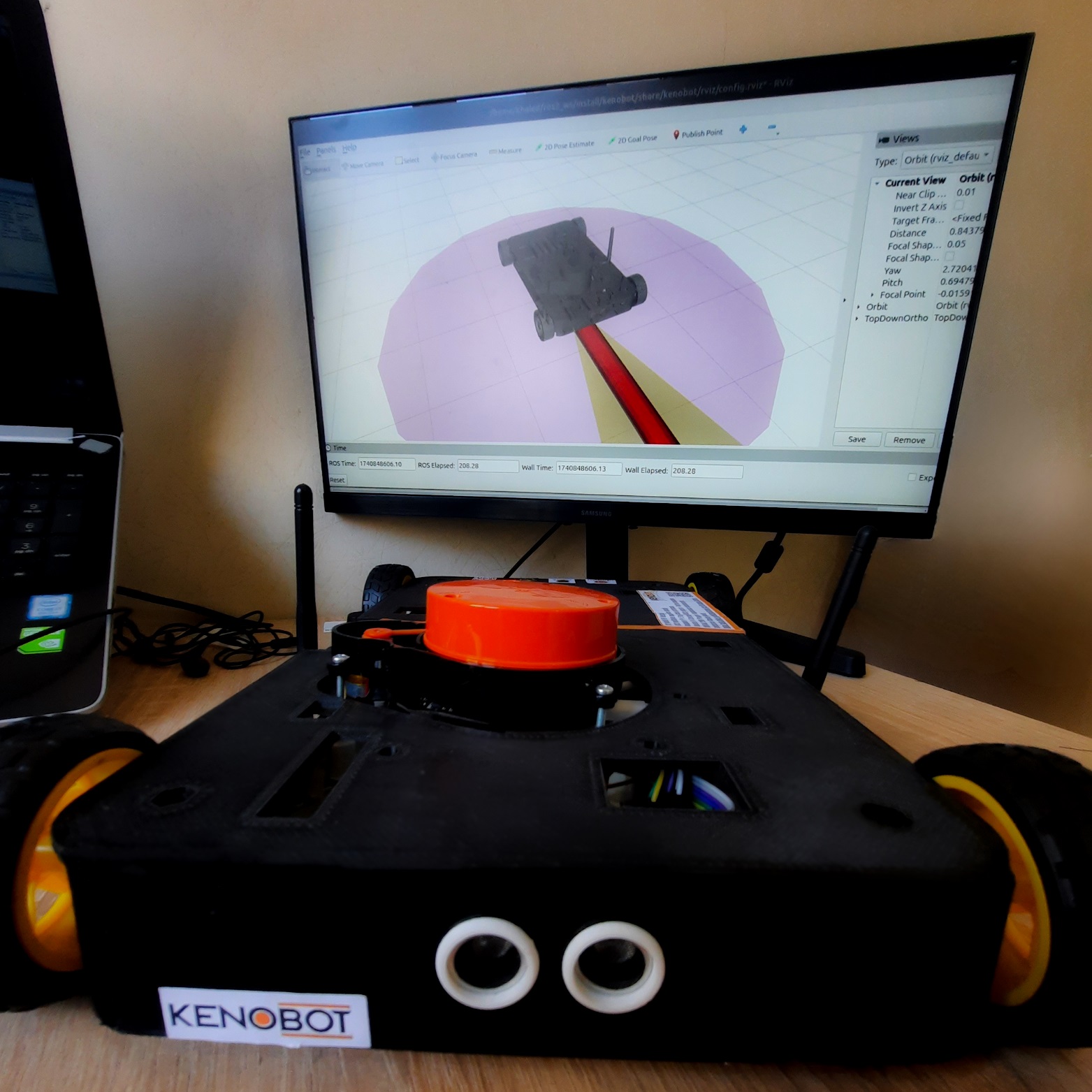
يعتمد KenoBOT على قاعدة حركة رباعية العجلات، وهيكل مطبوع بتقنية الطباعة ثلاثية الأبعاد، مع مجموعة حساسات تشمل LiDAR وIMU وحساس مسافة فوق صوتي. صُممت المنصة لتكون قابلة للتجربة والتعديل، بحيث يمكن اختبار الحساسات ووحدات الحركة والبرمجيات بشكل مستقل ثم دمجها ضمن النظام الكامل.

نظام التحكم والاتصال
يتكوّن نظام التحكم من طبقتين: طبقة منخفضة تعتمد على Arduino لتنفيذ أوامر الحركة والتحكم بالمحركات، وطبقة علوية تعتمد على Raspberry Pi 5 لتشغيل ROS2 ومعالجة بيانات الحساسات. كما يتضمن المشروع اتصالًا لاسلكيًا باستخدام وحدات RF لتبادل البيانات بين المنصة ووحدة التحكم أثناء التجارب.
النموذج المنفّذ

تم تنفيذ KenoBOT كنموذج أولي عملي ودمج مكوناته الأساسية ضمن منصة واحدة. يركّز المشروع في مرحلته الحالية على توفير قاعدة بحثية قابلة للتطوير، يمكن من خلالها اختبار أفكار التحكم والملاحة وجمع بيانات الحساسات ضمن بيئة مختبرية.
اكتملت الوظائف الأساسية للمنصة، ويستمر التطوير في تحسين دقة قراءات العجلات، وتطوير طبقة التموضع، وتعزيز تكامل بيانات LiDAR وIMU داخل واجهة RViz. هذه المرحلة تجعل KenoBOT منصة مناسبة للتجارب التعليمية والبحثية، وتمهّد لاستخدامها في دراسات علمية أكثر تفصيلًا.