Forward and Inverse Kinematics Analysis and Simulation in MATLAB of a 6R Industrial Robot
Introduction
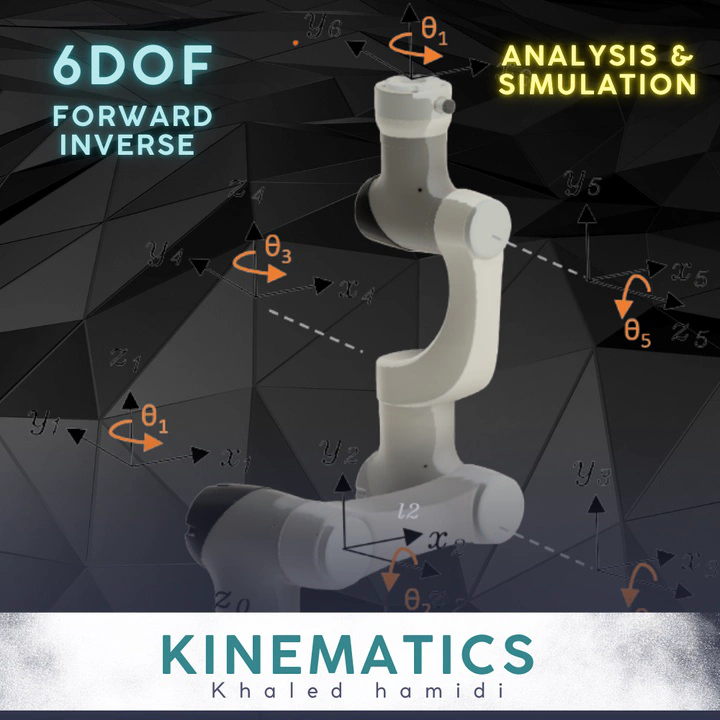
This study focuses on the Elfin E15, a 6-DOF industrial robot from Han’s Robot, composed of six revolute joints. The analysis employs the Denavit-Hartenberg (D-H) parameters to model the robot’s kinematics.
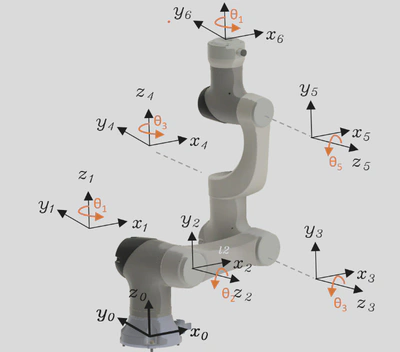
D-H Parameters
The D-H parameter table is crucial for defining the robot’s structure, including link lengths and joint orientations.
Table 1: Elfin E15 Robot Arm Link Coordinate Parameters
| Link | α_(i-1) | a_(i-1) | d_i | θ_i | Joint Variable |
|---|---|---|---|---|---|
| 1 | 0 | 0 | h_1 | θ_1 | θ_1 |
| 2 | 90 | 0 | 0 | θ_2 | θ_2 |
| 3 | 0 | a_2 | 0 | θ_3 | θ_3 |
| 4 | -90 | 0 | d_4 | θ_4 | θ_4 |
| 5 | +90 | 0 | 0 | θ_5 | θ_5 |
| 6 | -90 | 0 | d_6 | θ_6 | θ_6 |
Table 2: Link Lengths (mm)
| Link | Length |
|---|---|
| h_1 | 262 |
| a_2 | 580 |
| d_4 | 520 |
| d_6 | 173 |
Forward Kinematics Analysis
Forward kinematics determines the end effector’s position and orientation from given joint angles. This is achieved by computing transformation matrices between adjacent joint frames.
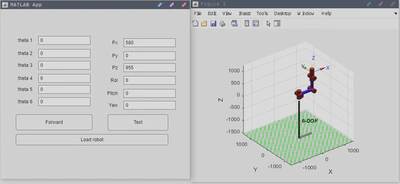
MATLAB Simulation
A MATLAB App Designer application was developed to simulate the robot’s motion. The robot_fkine function calculates the cumulative transformation matrices and visualizes the robot in a 3D plot.
Inverse Kinematics Analysis
Inverse kinematics calculates the required joint angles to achieve a desired end effector position and orientation. This is a more complex problem, often with multiple solutions.
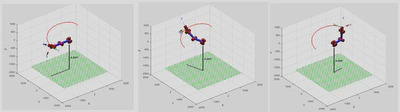
Motion Simulation
The robot’s trajectory is planned by interpolating between initial and final joint configurations. Forward kinematics is used to calculate the end effector’s path, which is then animated.