تحليل ومحاكاة الكينماتيكا الأمامية والعكسية لروبوت صناعي 6R في MATLAB
مقدمة
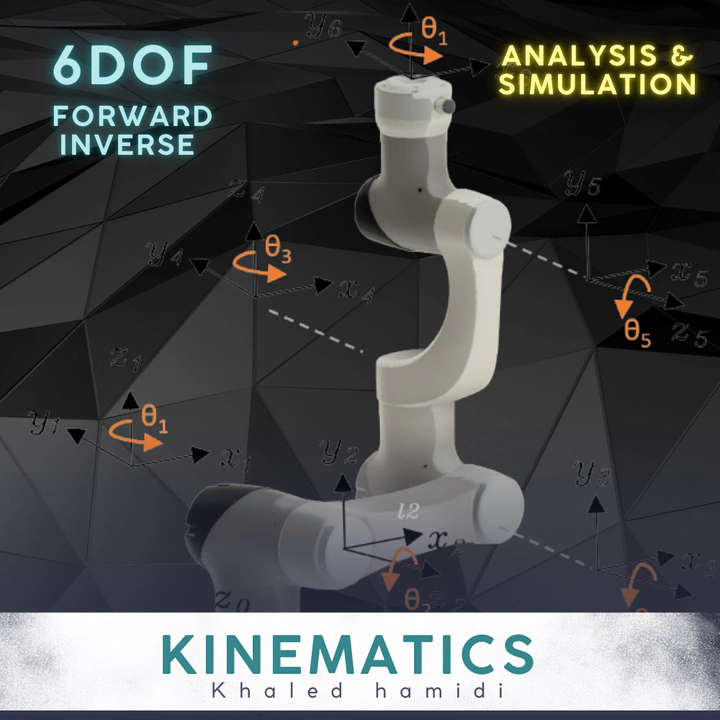
تركز هذه الدراسة على Elfin E15، وهو روبوت صناعي 6-DOF من Han’s Robot، يتكون من ستة مفاصل دورانية. يستخدم التحليل معلمات Denavit-Hartenberg (D-H) لنمذجة حركية الروبوت.
معلمات D-H
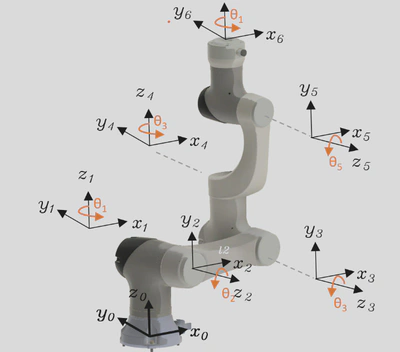
يعد جدول معلمات D-H أمرا بالغ الأهمية لتحديد بنية الروبوت، بما في ذلك أطوال الوصلات واتجاهات المفاصل.
الجدول 1: معلمات إحداثيات وصلة ذراع الروبوت Elfin E15
| الرابط | α_(i-1) | a_(i-1) | d_i | θ_i | متغير المفصل |
|---|---|---|---|---|---|
| 1 | 0 | 0 | h_1 | θ_1 | θ_1 |
| 2 | 90 | 0 | 0 | θ_2 | θ_2 |
| 3 | 0 | a_2 | 0 | θ_3 | θ_3 |
| 4 | -90 | 0 | d_4 | θ_4 | θ_4 |
| 5 | +90 | 0 | 0 | θ_5 | θ_5 |
| 6 | -90 | 0 | d_6 | θ_6 | θ_6 |
الجدول 2: أطوال الوصلات (مم)
| الرابط | الطول |
|---|---|
| h_1 | 262 |
| a_2 | 580 |
| d_4 | 520 |
| d_6 | 173 |
تحليل الكينماتيكا الأمامية
تحدد الكينماتيكا الأمامية موضع واتجاه المستجيب النهائي من زوايا مفاصل معينة. يتم تحقيق ذلك عن طريق حساب مصفوفات التحويل بين إطارات المفاصل المجاورة.
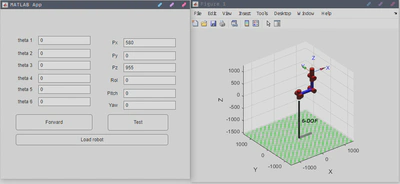
محاكاة MATLAB
تم تطوير تطبيق MATLAB App Designer لمحاكاة حركة الروبوت. تحسب الدالة robot_fkine مصفوفات التحويل التراكمية وتصور الروبوت في مخطط ثلاثي الأبعاد.
تحليل الكينماتيكا العكسية
تحسب الكينماتيكا العكسية زوايا المفاصل المطلوبة لتحقيق موضع واتجاه المستجيب النهائي المطلوب. هذه مشكلة أكثر تعقيدًا، وغالبًا ما يكون لها حلول متعددة.
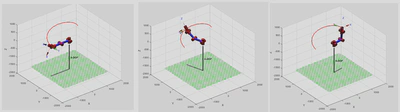
محاكاة الحركة
يتم تخطيط مسار الروبوت عن طريق الاستيفاء بين تكوينات المفاصل الأولية والنهائية. تستخدم الكينماتيكا الأمامية لحساب مسار المستجيب النهائي، والذي يتم تحريكه بعد ذلك.